Visual-Inertial Localization and Map Summarization Based on Prior Map
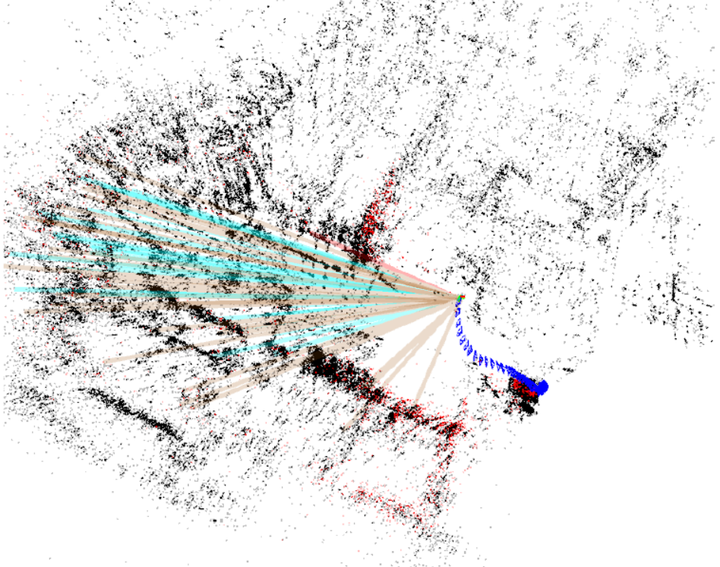 Image credit: Unsplash
Image credit: UnsplashAbstract
In Proceedings of 2019 Chinese Intelligent Automation Conference (CIAC), 2019.
Type
Publication
*Proceedings of 2019 Chinese Intelligent Automation Conference, 586
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.
Click the Slides button above to demo Academic’s Markdown slides feature.
Supplementary notes can be added here, including code and math.